









テストレポート
Tegra K1搭載の開発キット「Jetson TK1」を動かしてみた
2014年7月16日,NVIDIAは,GPUコンピューティング開発者イベント「GTC Japan 2014」を開催した。2014年のGTC Japanでは,組み込み機器関連のセッションが大幅に増えていた,という話は先のレポートでお伝え済みだが,そんななかでも注目したいのが,事前登録が必要でかつ有償となっていた「Jetson TK1」体験セッションだ。
NVIDIAの組み込み向け最新SoC(System-on-a-Chip)である「Tegra K1」を搭載した開発用ボードであるJetson TK1は,国内流通が始まってはいるものの,その数が少なく,触れている人もまだそれほど多くない。
今回4Gamerでは,そんなJetson TK1を実際に体験できるというセッションへ参加できたので,「Tegra K1搭載のワンボードコンピュータ」に触ってきた模様を簡単にまとめてみたいと思う。ゲームと直接の関係はないが,Tegra K1が気になっている人や,CUDAに興味がある人はチェックしてほしい。
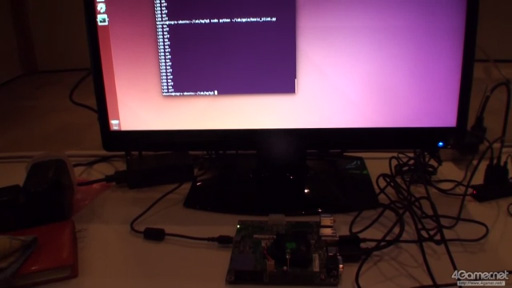
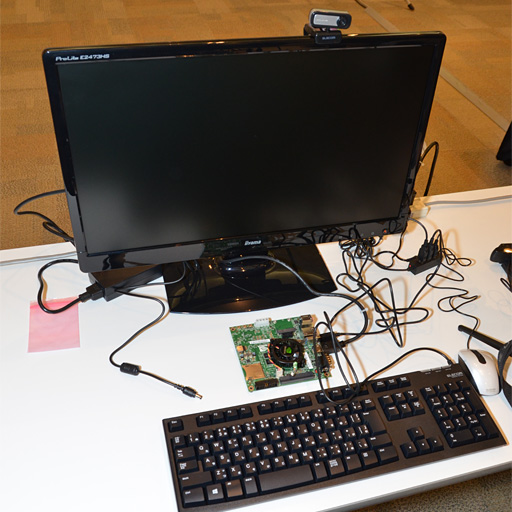
さて,セッションルームでは,各席にディスプレイやキーボードとの接続を終えたJetson TK1が置いてあり,受講者はすぐにJetson TK1を体験できるようになっていた。
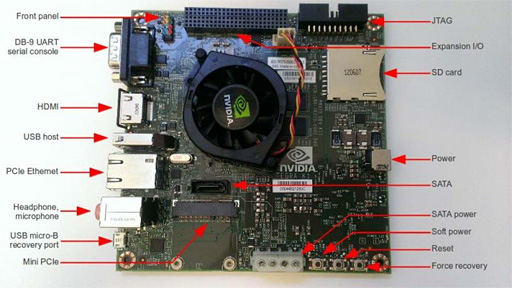
ディスプレイとの接続はHDMI(Type A)端子経由。Jetson TK1は1ポートのUSB 3.0ポート(Type A)を持つので,ここにUSBハブを接続すれば,その先にキーボードやマウスなどの周辺機器を接続できる。上の写真で気づいた人もいるだろうが,今回のセッションではコンピュータビジョンのサンプルを動かすために必要な周辺機器として,エレコム製のWebカメラ「UCAM-C0220FBBK」もハブ経由で接続されていた。
キーボードやマウスは,USB接続のものならメーカーは不問で,Webカメラも,よほど特殊な仕様でない限り接続できるとのことだった。
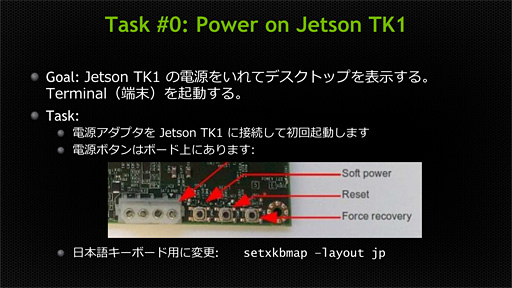
電源ユニットは,ノートPCに付属してきそうなACアダプターで,入力はAC100-240V/1.5A,出力はDC12V/5.0Aというスペックだ。これをJetson TK1の電源入力端子に接続すると,いきなりJetson TK1上の冷却ファンが回り始めて起動する仕様になっていた。万が一起動しない場合は,Jetson TK1上に用意された小さな[Reset]ボタンもしくは[Soft Power]ボタンを押すと再起動できるようだ。
起動後,最初にやるべきこととして指導されたのは,[Ctrl]+[Alt]+[T]キーでコマンドプロンプトを出してからの,
> setxkbmap -layout jp
の入力で,これは,キーボードのレイアウトを日本語仕様へ変更する操作に相当する。
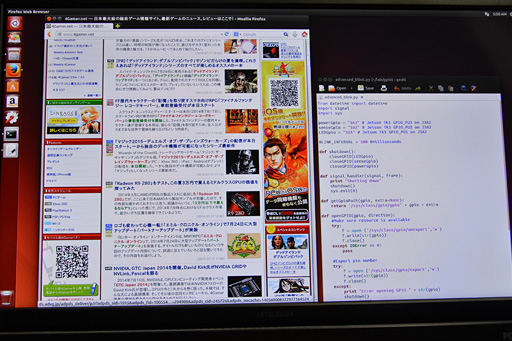
起動してしまえば,ただのUbuntu搭載PCといった感じで,LANケーブルでネットワークと接続すれば,プリインストールの「Mozilla Firefox」からWebブラウジングも普通に行えてしまう。
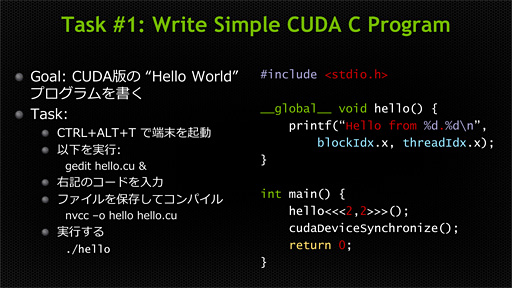
ここで,「Hello」を出力するだけの基礎的なプログラムの入力が課せられた。
CUDAは,C言語ベースのプログラミング言語なのだが,「用意したデータに対してプログラムを実行させる」という概念の拡張がなされている。それを参加者に実感してもらおうというのが狙いだ。
今回の「Hello」では,2×2のスレッドを立ち上げて,各スレッドから「Hello」を出力するようなプログラムになっていた。
サンプルリストはEbersole氏がスライドで示していたので,実際にやることはといえば,画面のサンプルを打ち込み,コンパイルして実行するだけだ。
ただ,CUDAの完全な初心者からすれば,テキストエディタとして「gedit」が用意されているとか,CUDAのソースプログラムは拡張子「.cu」で作成するとか,コンパイラは「nvcc」であるとかいった基礎的なことをここで学べるのであった。
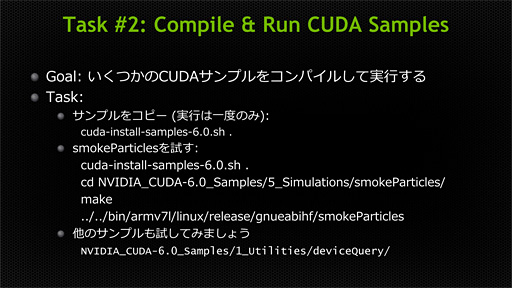
続いての課題は,Jetson TK1にプリインストールされているCUDA 6のサンプルプログラムをコンパイルして実行することである。
ここではまず,コマンドプロンプトからCUDA 6のサンプルプログラムをコピーするところから始まる。具体的には,
> cuda-install-samples-6.0.sh .
と入力することになる。最後のスペースとピリオドを忘れずに。
続いて,
> cd NVIDIA_CUDA-6.0_Samples/5_Simulations/smokeParticles/
と入力し,カレントディレクトリをサンプルプログラム階層の下とする。長いパス名は中途まで打ち込んで[TAB]キーを押すと補完入力を行ってくれるので利用したい。
コンパイルは,
> make
でOK。プログラムを書き換えない限り,コンパイルは一度実行すればそれでいい。
実際のプログラム実行は,
> ../../bin/armv7l/linux/release/gnueabihf/smokeParticles
で行える。「smokeParticles」のところを別のプログラム名にすれば,別のサンプルプログラムをコンパイルして実行することも可能だ。
サンプルプログラムを確認してみたところ,「NVIDIA_CUDA-6.0_Samples」階層下にはさまざまなものを確認できたので,Jetson TK1を入手できたら,いろいろと実行してみるといいのではなかろうか。見た目的に面白いのは,前出の「5_simulations」以外だと「2_Graphics」あたりか。
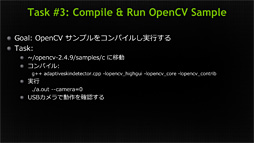
次はWebカメラを使う実験である。
具体的にはコンピュータビジョン用プログラミングAPI「OpenCV」のサンプルコードをJetson TK1上で実行する課題となる……のだが,その前に,Webカメラの動作を確認する必要がある。
このカメラ動作確認プログラムは,「検出した肌色部分を緑色にマーキングする」というもので,人の顔が緑色にマーキングされればOKとなる。
Webカメラの動作が完了したところで,実際のCPUで実装したOpenCVサンプルプログラムを実行する。
実行するのは,監視カメラのように定点設置されたカメラの映像から,動体と背景を分離するアルゴリズム「混合正規分布」(MOG:Mixture of Gaussian Distribution)のサンプルだ。
コンパイル後,
> ./bgfg_segm_cpu -c 0
として実行されるのがCPU版MOGアルゴリズムとなる。実効フレームレートにして約5〜7fpsといったところだ。
続いては,このサンプルプログラムをGPU版に改造する課題が出されたのだが,セッション時間が短いこともあり,今回は,
> cp bgfg_segm_solution.cpp bgfg_segm_gpu.cpp
と打ち込み,模範回答プログラム「bgfg_segm_solution.cpp」を「bgfg_segm_gpu.cpp」としてコピーしてコンパイルするのみに留まった。具体的には,
> make gpu
でコンパイルし,
> ./bgfg_segm_gpu -c 0
で実行する。
同一アルゴリズムを実行しているので,処理内容に変わりはない一方で,実効フレームレートは最大で10倍以上向上することを確認できた。これこそがGPUパワーの恩恵であり,Jetson TK1,そしてTegra K1の底力というわけである。
本稿の序盤で触れたとおり,Jetson TK1は組み込み機器向けの開発評価ボードである。なので「Tegra K1の演算性能を活かして,何か別のデバイスを操作したい」とか「何か別のデバイスへ出力したい」といった具合に,外部機器との連動を望むユーザーも多いはずである。
Jetson TK1には,先に述べたUSB 3.0のほか,シリアルポートも用意されているが,それよりもさらにローレベルな入出力を行うためのGPIO(General Purpose Input & Output)ポートも備わっている。
ここまでの課題は,どちらかといえば「コンピュータとしてJetson TK1をどう使うか」が対象となっていたが,最後の課題は,GPIOを使って外部デバイスとの連動を目指すものとなった。
とはいえ,短い時間でそれほど高度なことはできないので,接点スイッチとLEDを組み合わせたシンプルな実験が行われた。
最初の実験は,43番ピンと45番ピンに差し込まれたLEDを点滅させるという課題だ。
プログラムは「~/lab/gpio/」フォルダに用意されているので,実際にやることは,
> sudo python ~/lab/gpio/basic_blink.py
として実行させるだけである。
LED制御のプログラムはスクリプト言語Pythonで書かれていたが,Jetson TK1における基本的なGPIO経由の入出力処理はPyhtonで制御することになっている。このあたりは,基礎実験や教育用のワンボードコンピュータとして知られる「Raspberry Pi」とよく似た部分といえるだろう。
最後の課題は,GPIO側の46番ピンと49番ピンに接点スイッチを設け,このオン/オフを仮想的な周辺機器からの入力とし,それに呼応する形でプログラム側でLEDを点灯させるというものだ。
こちらもプログラム自体は保存済みなので,
> sudo python ~/lab/gpio/advanced_blink.py
として実行させるだけだが,接点スイッチを押している間だけLEDが点滅することを確認できた。
追加のサブ課題として,LEDの点滅タイミングを変更するというのが与えられたが,これはプログラムを開いて「BLINK_INTERVAL =」の数値を変えるだけでOK。Pythonはスクリプト言語なので再コンパイルの必要もなく,すぐに数値変更の結果を反映した形で実行できるのだ。

まさに入門といった内容だったが,いかがだったろうか。
Jetson TK1は組み込み機器向けの製品開発評価プラットフォームで,今のところ流通量も非常に少ないが,国内ではオリオスペックが正規品を扱っているので,2万4000円+税で次回以降の入荷分を予約できる。大学の研究室はもちろんのこと,個人レベルの電子工作用途にも応用できそうである。
これまで,ここまで高性能なGPUパワーを使ってさまざまな周辺機器と連動させられる安価なワンボードコンピュータはほとんどなかった。少なくとも筆者の知る限りは皆無だったように思う。Microsoftの「Kinect」が,その性能でアマチュア電子工作シーンにモーションセンシングブームを広めたように,Jetson TK1も今後,流通量が増えるにつれ,広がりを見せていくかもしれない。
 |
 |
今回4Gamerでは,そんなJetson TK1を実際に体験できるというセッションへ参加できたので,「Tegra K1搭載のワンボードコンピュータ」に触ってきた模様を簡単にまとめてみたいと思う。ゲームと直接の関係はないが,Tegra K1が気になっている人や,CUDAに興味がある人はチェックしてほしい。
ようこそJetson TK1へ
さて,セッションルームでは,各席にディスプレイやキーボードとの接続を終えたJetson TK1が置いてあり,受講者はすぐにJetson TK1を体験できるようになっていた。
 |
 |
キーボードやマウスは,USB接続のものならメーカーは不問で,Webカメラも,よほど特殊な仕様でない限り接続できるとのことだった。
電源ユニットは,ノートPCに付属してきそうなACアダプターで,入力はAC100-240V/1.5A,出力はDC12V/5.0Aというスペックだ。これをJetson TK1の電源入力端子に接続すると,いきなりJetson TK1上の冷却ファンが回り始めて起動する仕様になっていた。万が一起動しない場合は,Jetson TK1上に用意された小さな[Reset]ボタンもしくは[Soft Power]ボタンを押すと再起動できるようだ。
起動後,最初にやるべきこととして指導されたのは,[Ctrl]+[Alt]+[T]キーでコマンドプロンプトを出してからの,
> setxkbmap -layout jp
の入力で,これは,キーボードのレイアウトを日本語仕様へ変更する操作に相当する。
 |
起動してしまえば,ただのUbuntu搭載PCといった感じで,LANケーブルでネットワークと接続すれば,プリインストールの「Mozilla Firefox」からWebブラウジングも普通に行えてしまう。
 |
「CUDAのプログラミングの基礎の基礎」を体験
ここで,「Hello」を出力するだけの基礎的なプログラムの入力が課せられた。
CUDAは,C言語ベースのプログラミング言語なのだが,「用意したデータに対してプログラムを実行させる」という概念の拡張がなされている。それを参加者に実感してもらおうというのが狙いだ。
今回の「Hello」では,2×2のスレッドを立ち上げて,各スレッドから「Hello」を出力するようなプログラムになっていた。
 |
 |
サンプルリストはEbersole氏がスライドで示していたので,実際にやることはといえば,画面のサンプルを打ち込み,コンパイルして実行するだけだ。
ただ,CUDAの完全な初心者からすれば,テキストエディタとして「gedit」が用意されているとか,CUDAのソースプログラムは拡張子「.cu」で作成するとか,コンパイラは「nvcc」であるとかいった基礎的なことをここで学べるのであった。
CUDA 6のサンプルプログラムを実行する
続いての課題は,Jetson TK1にプリインストールされているCUDA 6のサンプルプログラムをコンパイルして実行することである。
 |
ここではまず,コマンドプロンプトからCUDA 6のサンプルプログラムをコピーするところから始まる。具体的には,
> cuda-install-samples-6.0.sh .
と入力することになる。最後のスペースとピリオドを忘れずに。
続いて,
> cd NVIDIA_CUDA-6.0_Samples/5_Simulations/smokeParticles/
と入力し,カレントディレクトリをサンプルプログラム階層の下とする。長いパス名は中途まで打ち込んで[TAB]キーを押すと補完入力を行ってくれるので利用したい。
コンパイルは,
> make
でOK。プログラムを書き換えない限り,コンパイルは一度実行すればそれでいい。
実際のプログラム実行は,
> ../../bin/armv7l/linux/release/gnueabihf/smokeParticles
で行える。「smokeParticles」のところを別のプログラム名にすれば,別のサンプルプログラムをコンパイルして実行することも可能だ。
サンプルプログラムを確認してみたところ,「NVIDIA_CUDA-6.0_Samples」階層下にはさまざまなものを確認できたので,Jetson TK1を入手できたら,いろいろと実行してみるといいのではなかろうか。見た目的に面白いのは,前出の「5_simulations」以外だと「2_Graphics」あたりか。
コンピュータビジョンのサンプルプログラムを実行する
 |
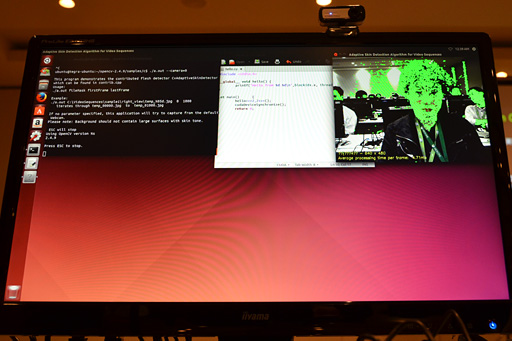
具体的にはコンピュータビジョン用プログラミングAPI「OpenCV」のサンプルコードをJetson TK1上で実行する課題となる……のだが,その前に,Webカメラの動作を確認する必要がある。
このカメラ動作確認プログラムは,「検出した肌色部分を緑色にマーキングする」というもので,人の顔が緑色にマーキングされればOKとなる。
 |
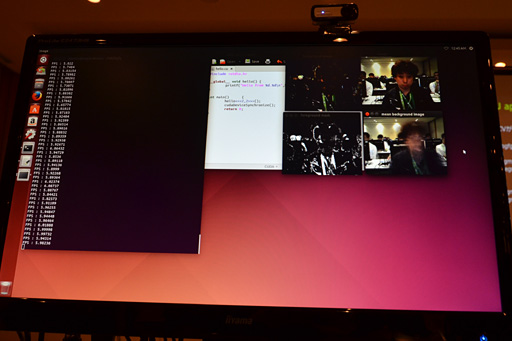
Webカメラの動作が完了したところで,実際のCPUで実装したOpenCVサンプルプログラムを実行する。
実行するのは,監視カメラのように定点設置されたカメラの映像から,動体と背景を分離するアルゴリズム「混合正規分布」(MOG:Mixture of Gaussian Distribution)のサンプルだ。
コンパイル後,
> ./bgfg_segm_cpu -c 0
として実行されるのがCPU版MOGアルゴリズムとなる。実効フレームレートにして約5〜7fpsといったところだ。
 |
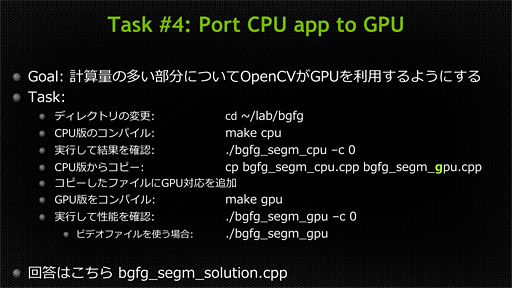
続いては,このサンプルプログラムをGPU版に改造する課題が出されたのだが,セッション時間が短いこともあり,今回は,
> cp bgfg_segm_solution.cpp bgfg_segm_gpu.cpp
と打ち込み,模範回答プログラム「bgfg_segm_solution.cpp」を「bgfg_segm_gpu.cpp」としてコピーしてコンパイルするのみに留まった。具体的には,
> make gpu
でコンパイルし,
> ./bgfg_segm_gpu -c 0
で実行する。
 |
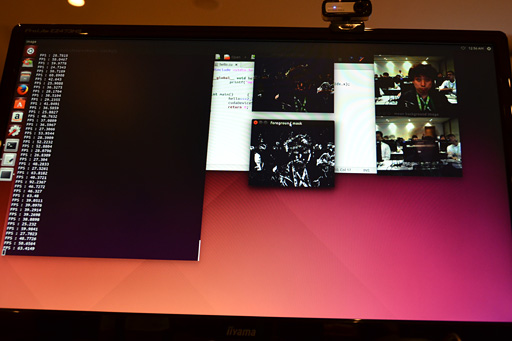
同一アルゴリズムを実行しているので,処理内容に変わりはない一方で,実効フレームレートは最大で10倍以上向上することを確認できた。これこそがGPUパワーの恩恵であり,Jetson TK1,そしてTegra K1の底力というわけである。
 |
Jetson TK1でGPIOを制御する
 |
Jetson TK1には,先に述べたUSB 3.0のほか,シリアルポートも用意されているが,それよりもさらにローレベルな入出力を行うためのGPIO(General Purpose Input & Output)ポートも備わっている。
 |
ここまでの課題は,どちらかといえば「コンピュータとしてJetson TK1をどう使うか」が対象となっていたが,最後の課題は,GPIOを使って外部デバイスとの連動を目指すものとなった。
とはいえ,短い時間でそれほど高度なことはできないので,接点スイッチとLEDを組み合わせたシンプルな実験が行われた。
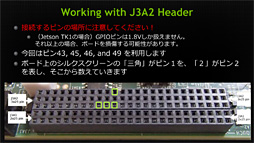
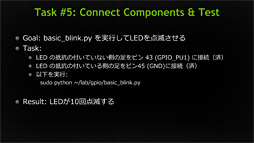
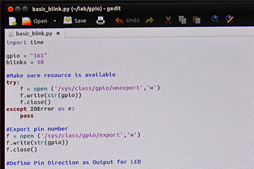
最初の実験は,43番ピンと45番ピンに差し込まれたLEDを点滅させるという課題だ。
プログラムは「~/lab/gpio/」フォルダに用意されているので,実際にやることは,
> sudo python ~/lab/gpio/basic_blink.py
として実行させるだけである。
 |
 |
 |
最後の課題は,GPIO側の46番ピンと49番ピンに接点スイッチを設け,このオン/オフを仮想的な周辺機器からの入力とし,それに呼応する形でプログラム側でLEDを点灯させるというものだ。
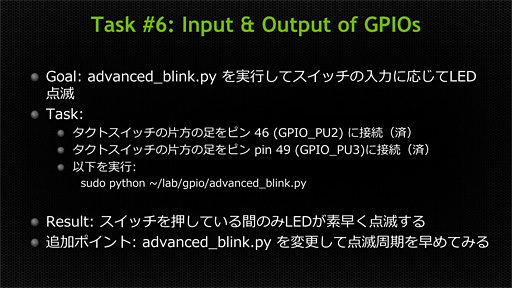 |
こちらもプログラム自体は保存済みなので,
> sudo python ~/lab/gpio/advanced_blink.py
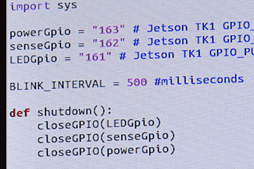 |
追加のサブ課題として,LEDの点滅タイミングを変更するというのが与えられたが,これはプログラムを開いて「BLINK_INTERVAL =」の数値を変えるだけでOK。Pythonはスクリプト言語なので再コンパイルの必要もなく,すぐに数値変更の結果を反映した形で実行できるのだ。
“遊べる”評価ボードといえるJetson TK1
まさに入門といった内容だったが,いかがだったろうか。
Jetson TK1は組み込み機器向けの製品開発評価プラットフォームで,今のところ流通量も非常に少ないが,国内ではオリオスペックが正規品を扱っているので,2万4000円+税で次回以降の入荷分を予約できる。大学の研究室はもちろんのこと,個人レベルの電子工作用途にも応用できそうである。
これまで,ここまで高性能なGPUパワーを使ってさまざまな周辺機器と連動させられる安価なワンボードコンピュータはほとんどなかった。少なくとも筆者の知る限りは皆無だったように思う。Microsoftの「Kinect」が,その性能でアマチュア電子工作シーンにモーションセンシングブームを広めたように,Jetson TK1も今後,流通量が増えるにつれ,広がりを見せていくかもしれない。
4Gamer.net最新情報
プラットフォーム別新着記事
総合新着記事
企画記事
新着連載
新着レビュー
新着インタビュー